煤仓清理机器人通过机器人视觉系统判断煤仓壁粘结物的实际情况,通过远程遥控清理作业,提高工作效率、降低施工成本。

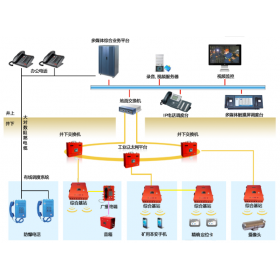
产品架构图
矿用煤仓清理机器人主要由三部分组成:双层平台遥控升降、支撑及工作液压臂、液控及监控系统组成。该机既适用于矿山地面洗煤厂(装车站)煤仓自动化清理、疏通,又适合于井下转运煤仓(岩仓)的机械化清理。有效解决各类煤仓蓬煤、粘壁、冻煤、堵仓等问题,全程视频监控,遥控作业,能够安全有效的替代人工作业,有效解决放炮、空气炮清理的安全问题。
二、产品特点
1、遥控行走升降,工作臂360°立体作业全程视频监控。
2、挖斗、破碎锤、钻铰头,可快速更换。
3、工作台收缩后分为φ2000㎜和φ1500㎜两种,其中φ2000㎜采用中间法兰连接,可快速拆解,且支撑臂于挖臂分为三节伸缩臂,适用于不同断面仓体。
4、既适合井下转运煤仓,也适合地面洗煤厂、装车站大型煤仓和缓冲仓。
三、产品参数表
|
序号 |
名称 |
单位 |
MQC-1参数 |
MQC-2参数 |
|
|
1 |
清理煤仓直径 |
m |
2.0~8.0 |
6.0~16.0 |
|
|
2 |
升降 |
升降高度 |
m |
30 |
50 |
|
机构 |
可承载重量 |
kg |
2000~3000 |
3000~8000 |
|
|
3 |
工作 |
机械臂行程 |
mm |
2100 |
7000 |
|
平台 |
回转角度 |
度 |
360 |
360 |
|
|
4 |
机身尺寸(可拆卸) |
mm |
φ1500×2000 |
φ2500×2500 |
|