硬件特色
两个多线激光雷达
两个多层激光雷达可进行三维扫描,结合业界领先的SLAM算法提供高质量、高精度的点云数据。
完整的360°全景影像
顶部的四个摄像头可拍摄高分辨率影像,无视野盲点,操作员自身不会被采集在影像中。
优化设计
新型设计:可穿戴式激光扫描仪,设备整体位于扫描员正前方,可以进行有针对性的扫描,可从内置屏幕了解实时扫描动态。
地面和墙壁控制点兼容
兼容扫描地面和墙壁的控制点,以实现测绘级精度和自动的数据集校准。
软件特色
后处理软件
VLX配有一套完整的后处理软件,设置好参数后即可自动处理生成各类主流格式的高精度的点云,并将拍摄到的影像拼接成720°全景影像。
●准确、可靠的SLAM算法提供测绘级精度的点云
●精确还原真实场景细节
●高度逼真的点云纹理
●自动检测和移除动态物体点云
●自动生成沉浸式360°数字化场景
IndoorViewer平台
用户可以通过访问数字孪生模型浏览扫描的项目的点云和全景并与之交互。
●真实场景的数字孪生模型展示平台(点云全景相互贴合)
●基于浏览器,任意终端皆可访问
●自由添加兴趣点 兴趣点内支持插入各类内容
●支持线上测量长度&面积
●可通过网页链接分享位置信息
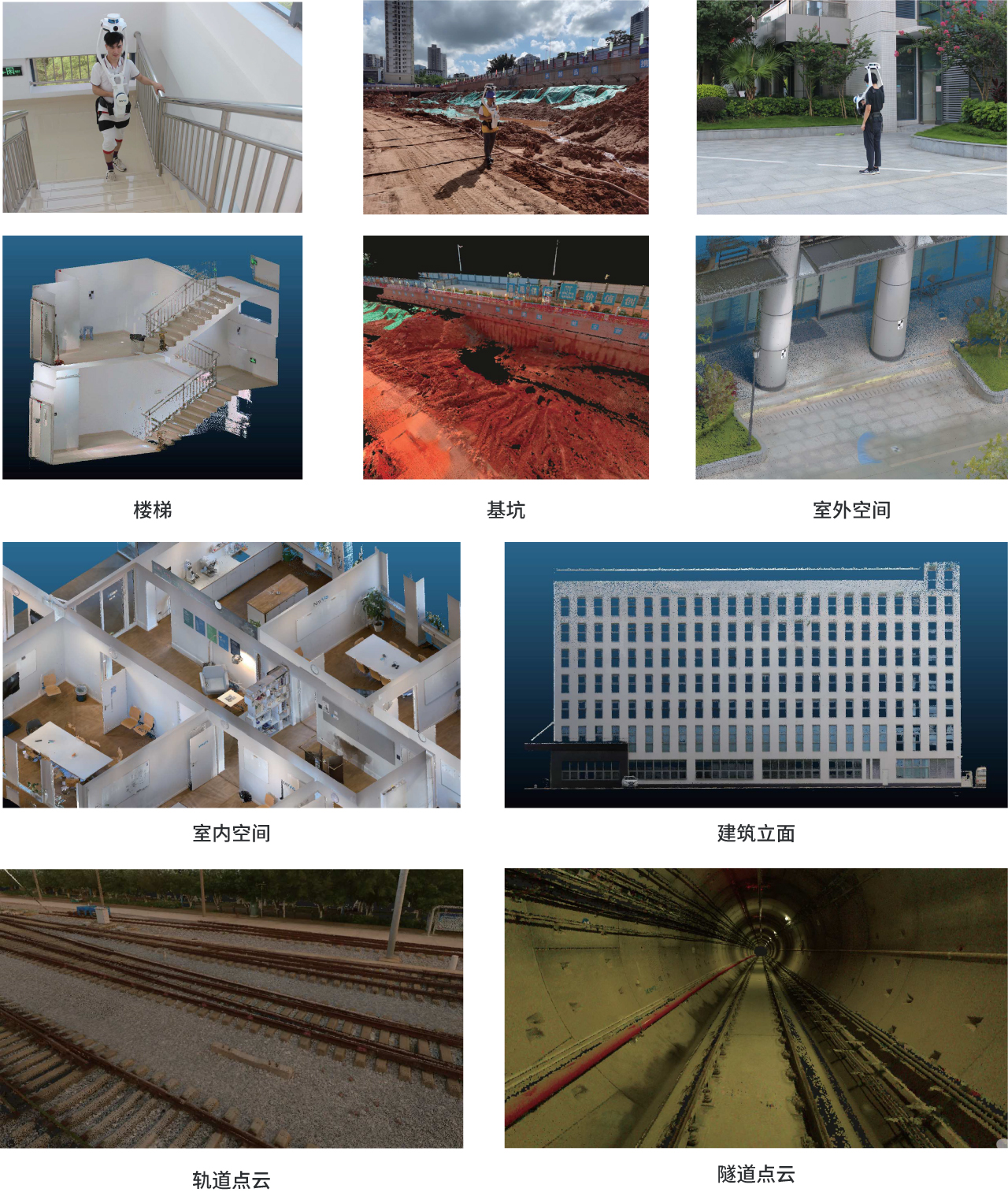
数据采集&效果展示
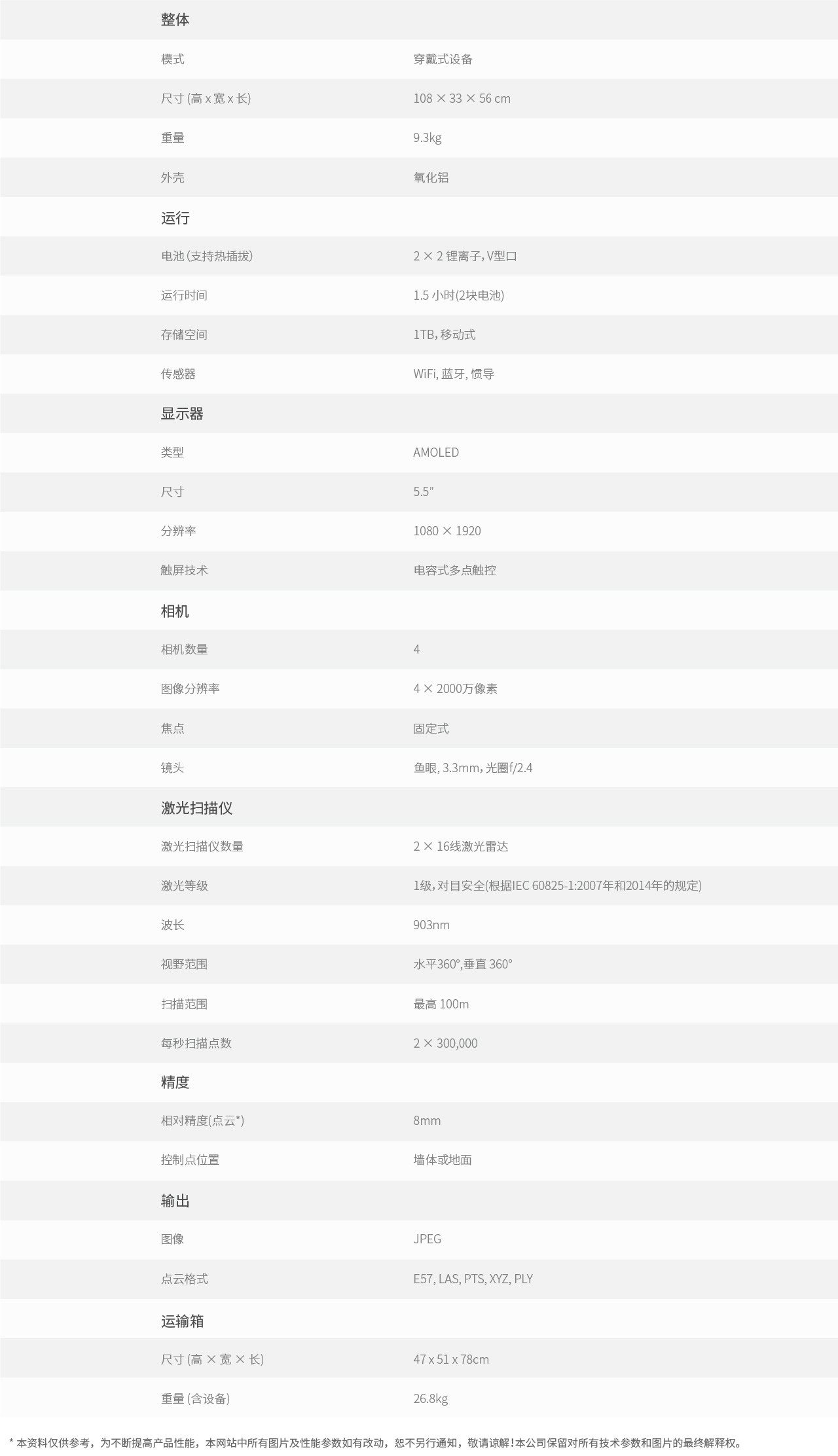
技术参数