系统概述
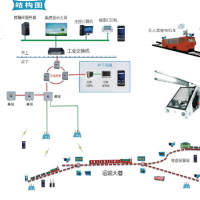
无极绳绞车无人跟车及远程集控系统由一路基站实现以下四项系统构成内容:
第一:视频——沿途的随车移动视频AI识别,自动报警、停车。
第二:通信——司机和机尾及沿途的基站式融合语音和信号通信,急停,广播。
第三:自动化控制——阻车器、挡车栏、跑车防护装置的自动化起落,司控道岔装置按调度自动转道,并保持岔尖密贴。
第四:报警和保护——梭车UWB精确定位, 丢车报警、掉道报警, 超速和欠速报警,张紧力报警和过卷保护。
系统特色:实现多网融合, 一路基站实现无线A I视频, 无线通讯, 无线广播, UWB无线精确定位,智能调度及远程集控;集成到统一的技术,统一的平台,避免重复投资建设,节约维护成本。
必要性:无人跟车系统可以减少跟车工风险,避免伤亡事故。
2.1功能实现清单
Ø 绞车UWB精确定位及RFID辅助定位,无线控制信号、数据传输,绞车运行地图运行状态显示,实时速度、距离检测,对过速和欠速报警、授权开启绞车。
Ø 绞车无线视频监控,绞车运行实时摄像显示及录像回放。
Ø 绞车丢车报警。
Ø 绞车掉道报警。
Ø 绞车过卷保护。
Ø 绞车运行过程中道岔、阻车器自动控制。道岔和阻车器显示器具备现场编码功能,遥控发送器具备至少100组编码匹配,且遥控发送器具备OLED显示屏显示编码和控制指令信息。
Ø 广播分站具备打点、对讲、急停、语音广播。
Ø 手持机具备移动打点、通话、急停,射频和联网通讯双模功能。
Ø 移动电子围栏报警,UWB精确定位。
Ø 物料监视报警或报警急停。
2.2基本工作原理
2.2.1绞车定位
绞车定位系统分为UWB精确定位及RFID辅助定位,UWB精确定位可以根据绞车的实时运行状态跟踪计算当前绞车的位置,定位精度高,误差小,在环境良好的情况下误差可以控制在30cm。
RFID辅助定位可以帮助系统在UWB盲区或者区域联动时做触发信号定位,有助于系统更好的实现绞车运行状况控制。
基本定位原理:
Ø 绞车在运行过程中,实时与基站保持测距通信,各个基站会实时将绞车与基站的距离信息上报到控制台。
Ø 控制台根据基站上报的信息,通过定位算法,计算出绞车相对于各个基站的位置。
Ø 根据计算结果,控制台将相对坐标转化为地图坐标显示到监视器的地图中,以实现对绞车的实时位置跟踪。
2.2.2绞车运行状态实时定位、监控
绞车运行状态包含:定位信息、运行参数、故障状态等。
定位信息可以实时显示到监视器的地图当中,并实时更新。绞车的运行参数包含绞车速度、打点状态、传感器状态等等,过速和欠速报警。
故障状态包含:绞车运行过程中的各种故障检测状态:丢车、掉道、过卷保护,过速和欠速报警等。
岗位持证控制信号标识卡控制可控状态,授权开启绞车。未取得岗位培训合格司机不配备上岗识别卡,不能授权开启操作绞车。
2.2.3绞车前后环境视频监控
机头装有前后监控摄像头,通过移动的wifi漫游网络,控制中心可以实时监控绞车的运行状态和环境,方便记录和对突发状况及时相应。
2.2.4绞车丢车、掉道报警
通过RFID卡和信标识别主机识别车皮数量,多点判断是否发生丢车。
系统通过掉道传感器实时监测到绞车掉道,系统将产生报警。
基本原理
Ø 信标识别主机可以在绞车运行过程中定点读取车皮卡标识。
Ø 掉道传感器,通过数据模型匹配,当监视到触发掉道规则时,则认为是故障状态,识别为掉道现象。
Ø 控制台检测到故障状态时,根据运行策略进行报警与动作。
2.2.5绞车过卷保护
系统在绞车运行的首尾都安装有过卷保护器,同时有RFID、UWB等系统辅助,当绞车触发保护器时,则认为过卷,系统将立即产生报警并急停。
过卷保护器通过网络实时连接并保持在线,一旦掉线将会产生掉线报警。
基本原理
Ø 在轨道过卷位置前后,设计2级过卷保护。
Ø 过卷保护器具有开关探测信号,并实时与控制台保持联系。
Ø 当绞车触发1级保护器时,系统开始预警,并广播过卷通知。
Ø 触发2级保护器时,系统将自动动作切断绞车电源(可根据策略调整)。
2.2.6绞车阻车器溜车阻挡
道岔或阻车器处于常闭状态,绞车发生溜车时,系统将综合防丢车、传感器、RFID等各项参数及时识别并相应,控制台通过网络,实时监测各个道岔和阻车器的状态,在机车运行时,设置采集点或动作点,保证机车在运行到固定位置时,自动打开道岔或阻车器,保证机车通行;并对其实施闭环监测,若出现不到位或故障状态,则停止绞车运行并报警。道岔和阻车器显示器具备现场编码功能,遥控发送器具备至少100组编码匹配,且遥控发送器具备OLED显示屏显示编码和控制指令信息。
2.2.7绞车沿路广播及打点
多业务基站具备语音广播、打点、急停,wifi覆盖、UWB定位等多种业务功能,结合移动手持机,可以与控制台进行实时语音通信、打点、急停。
基本原理
Ø 多业务基站包含语音通话功能,属于同一个巷道的基站需要配置为同一个频道,该频道用于语音通信及打点。
Ø 手持机在该巷道内使用时,也需要配置为同样的频道才能与控制中心进行通信、打点、急停。
Ø 语音通信和打点在工作时,是广播方式工作,即当任意一个终端进行语音或打点时,所有相同频段的设备都会收到并播放和显示。
Ø 同时,多业务基站还具有急停功能,当任意一个基站按下急停按钮时,控制中心都会循环广播急停请求,提醒控制中心操作员按下急停按钮,停止绞车运行。
2.2.8移动电子围栏报警
通过UWB基站和定位卡所组成的定位系统,在地图中规划绞车运行区域,当出现人员进入运行区域的事件时,产生报警事件。
基本原理
Ø 以梭车为中心前后30米标示出运行区域,并随梭车移动(移动电子围栏)。
Ø 当配备有定位卡的人员出现在移动电子围栏内部时,则系统自动产生声光报警,提醒人员远离,并发出提醒司机报警。
2.2.9物料监视报警
车载物料监视系统可以通过高速摄像头实时监视所有物料固定状态,对物料发生突变的情况实时识别并报警。
基本原理
Ø 通过考察现场环境,针对绞车所有物料及固定方式,建立物料模型并布置到运算主机当中。
Ø 识别系统根据车厢数量和长度安排安装探头和补光灯的数量,然后汇总通过光纤或网线交换机连接到运算主机。
Ø 运算主机控制高速摄像探头在多个监控点实时抓拍运行画面,并实时计算。
Ø 当出现模型数据并符合设定的报警状态时,则产生各种报警状态;例如可设定为:当机车物料状态超过30%时,向司机和沿途声光报警;当机车物料状态超过50%时,向司机和沿途声光报警并紧急停车(可根据策略调整)。